Autonomous Navigation System in Agricultural Environments

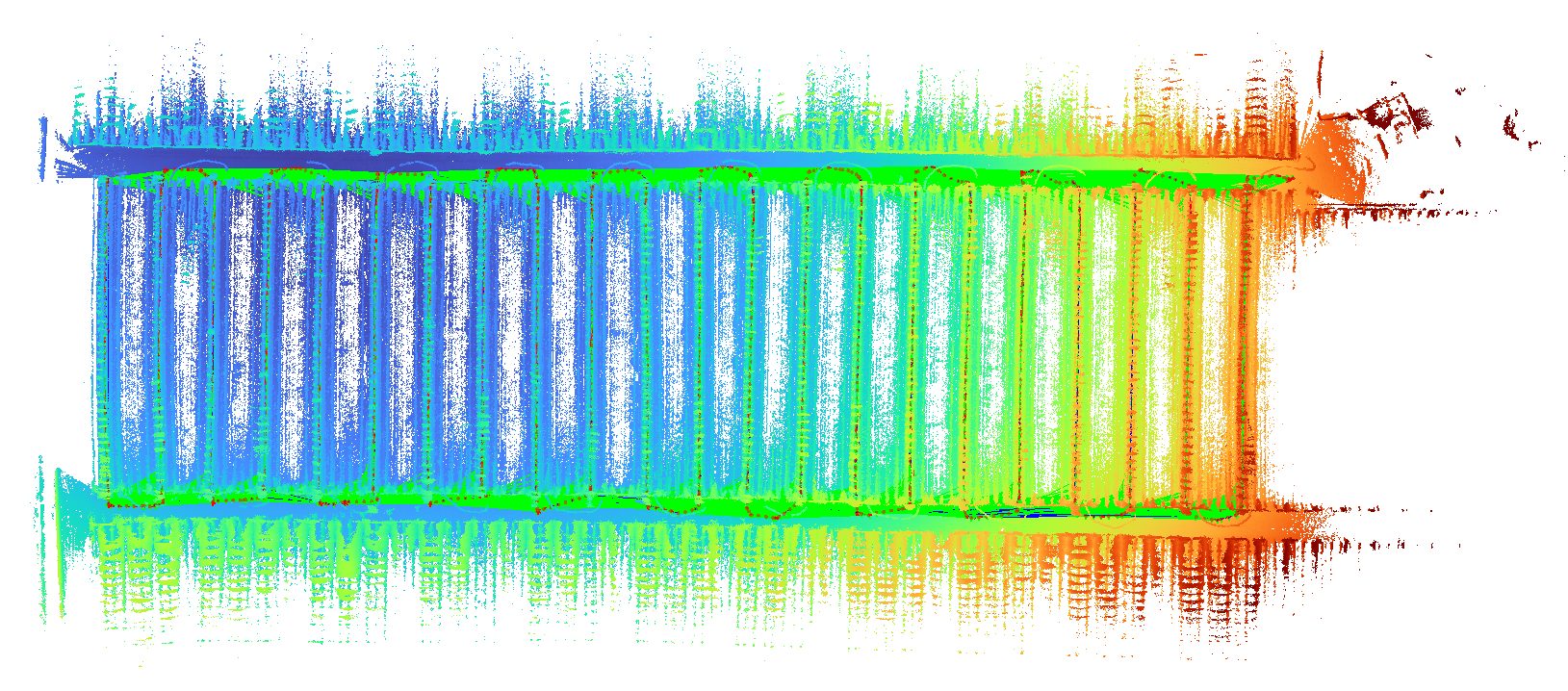
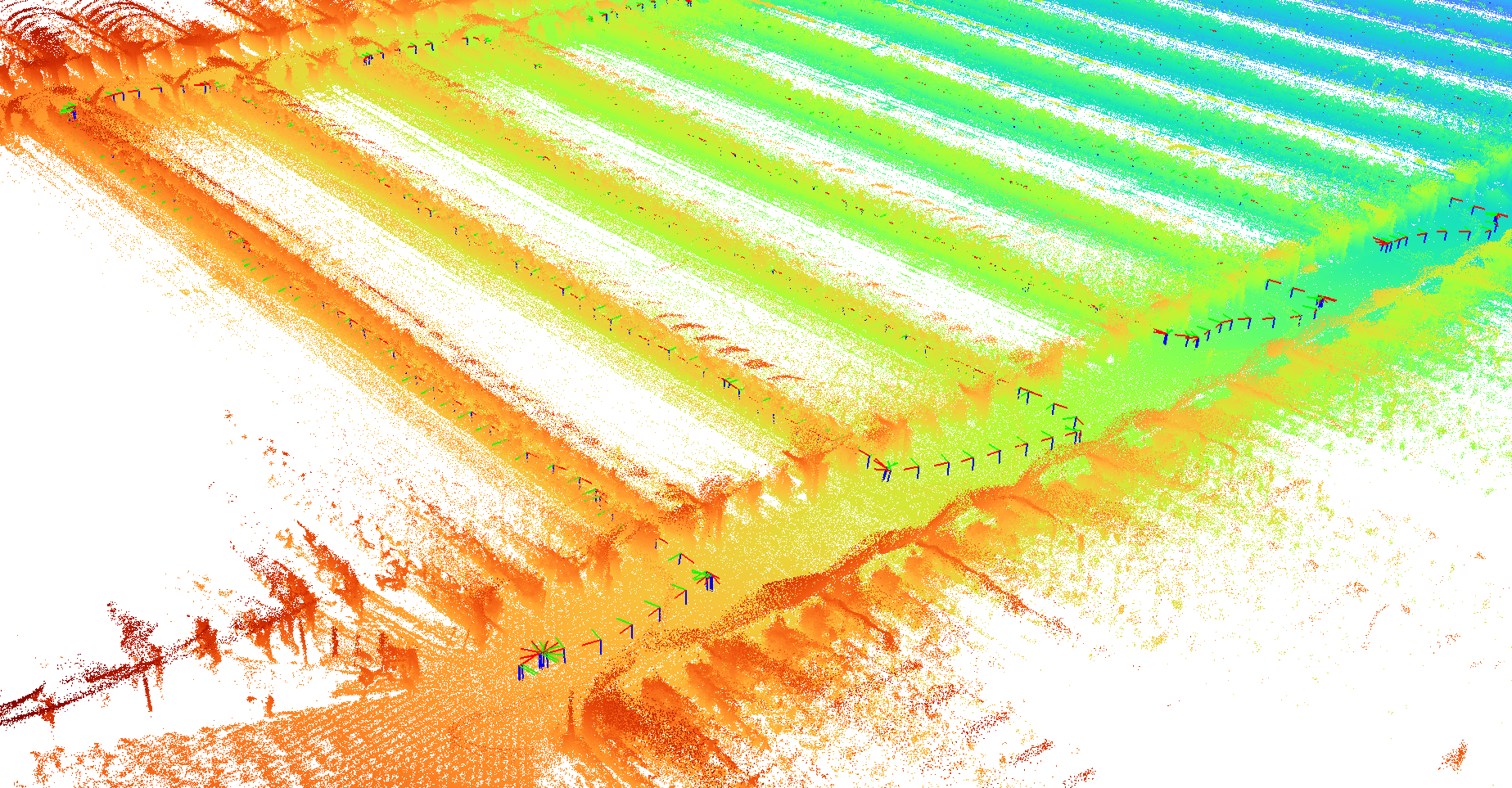
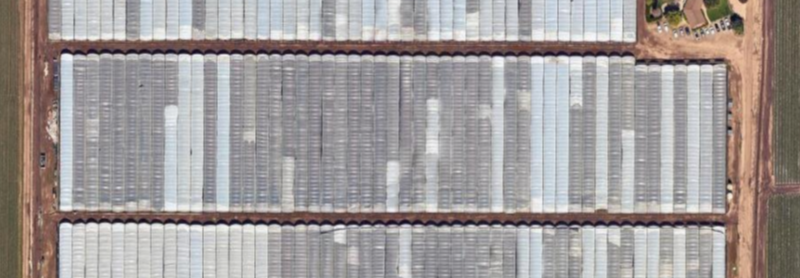
An autonomous mobile robotic system for large-scale agricultural data collection and mapping, built with multimodal sensing including RGB, depth, LiDAR, and GPS. The system integrates SLAM and open-vocabulary semantic mapping to construct kilometer-scale, queryable 3D maps in real-world farm environments. It is deployed on real robotic platforms across farms in Fargo, ND and Oxnard, CA, addressing challenges such as GNSS degradation, highly repetitive crop structures, and long-horizon traversal.